Robotische telescopen
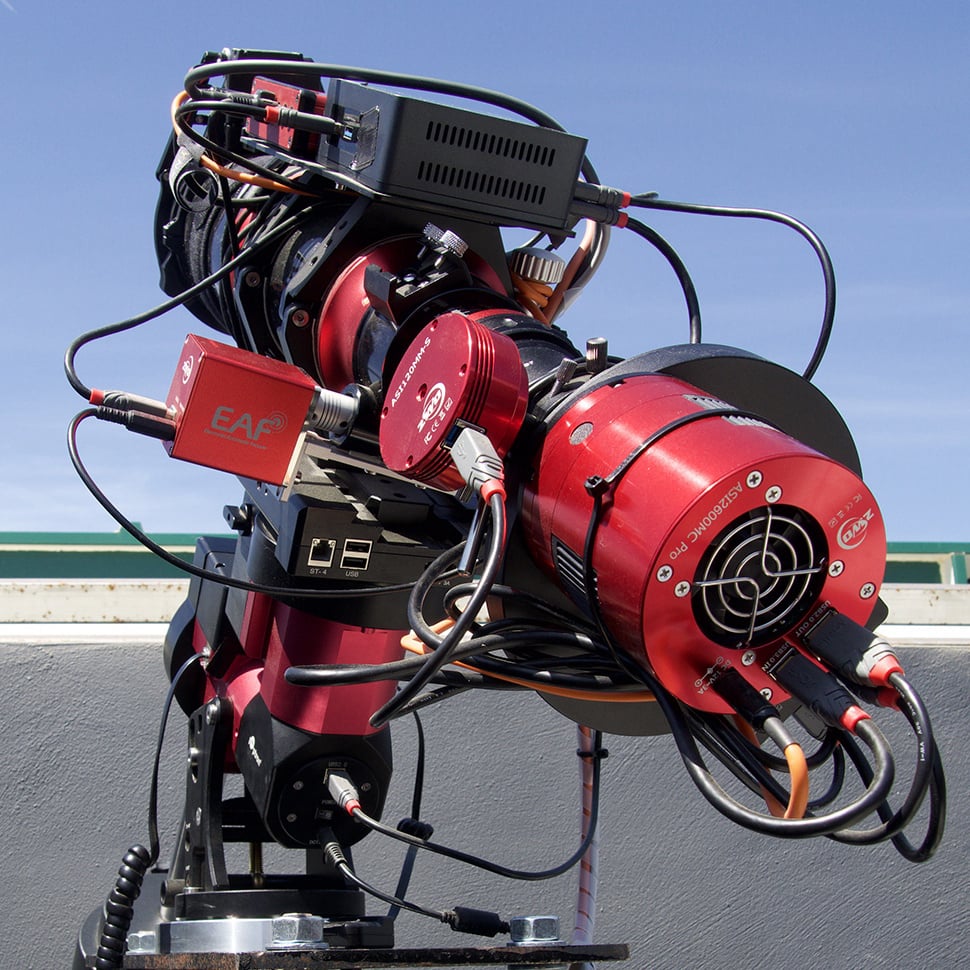
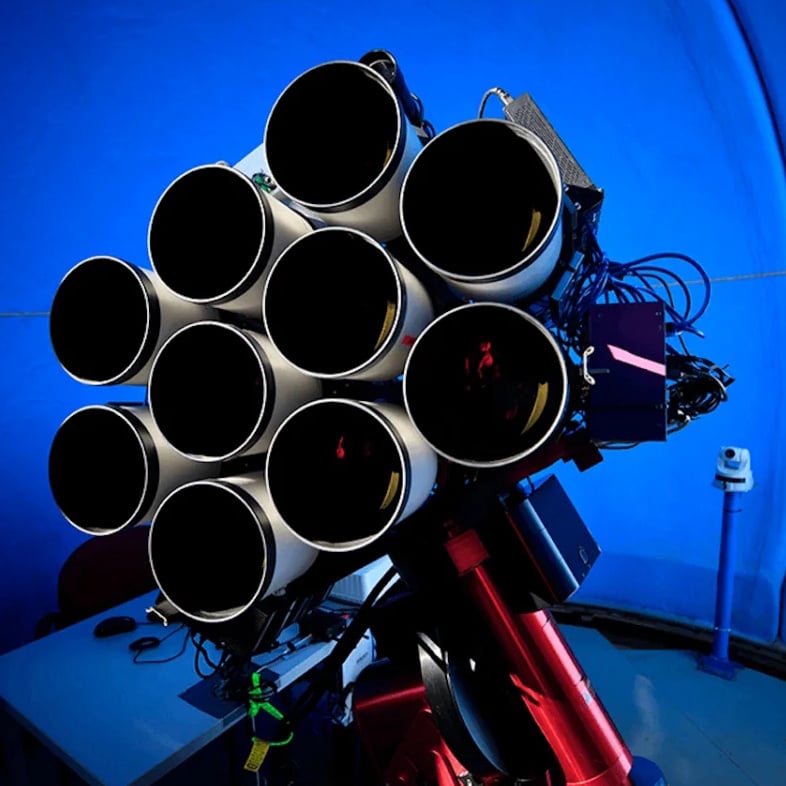
Een robotische telescoop is een astronomisch telescoop- en detectorsysteem dat waarnemingen verricht zonder menselijke tussenkomst. In de astronomie wordt een telescoop als robotisch beschouwd als deze waarnemingen uitvoert zonder menselijke bediening, zelfs als een mens de waarnemingen aan het begin van de nacht moet starten of 's ochtends moet beëindigen. Het systeem kan softwareagenten bevatten die gebruikmaken van kunstmatige intelligentie en op verschillende manieren ondersteuning bieden, zoals automatische planning. Een robotische telescoop is iets anders dan een telescoop die op afstand wordt bediend, hoewel een instrument zowel robotisch als op afstand bediend kan zijn.
In 2004 waren robotische waarnemingen verantwoordelijk voor een overweldigend percentage van de gepubliceerde weten-schappelijke informatie over asteroïdebanen en -ontdekkingen, onderzoek naar variabele sterren, lichtkrommen van supernova's en -ontdekkingen, kometenbanen en waarnemingen van gravitationele microlensing.